Mīkini Hoʻopili Lopako - Hoʻopau ʻili ʻakomi kiʻekiʻe





Kiʻikuhi kikoʻī

ʻIkepili o ka Mīkini Polishing Robotic
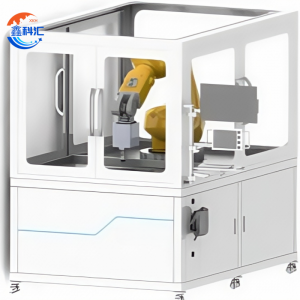
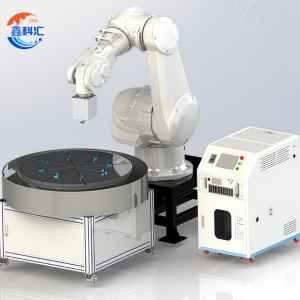
ʻO ka Mīkini Polishing Robotic kahi ʻōnaehana hana ʻili holomua a piha i ka hana ponoʻī i hoʻolālā ʻia e hoʻokō i nā koi kiʻekiʻe loa i ka hana pololei. Hoʻohui ia i ka mana robotic ʻeono-axis, ka ʻenehana polishing force-feedback, a me ka hoʻonohonoho poʻo pālua e lawelawe i nā ʻano mea like ʻole a me nā geometries paʻakikī me ka pololei a me ke kūlike loa.
Inā no nā aniani maka, nā ʻāpana aerospace, nā ʻāpana ʻenekinia precision, a i ʻole nā noi semiconductor, hāʻawi kēia mīkini i nā ʻili paʻa, hiki ke hana hou ʻia, a me ke ʻano kiʻekiʻe—ʻoiai ma nā hoʻomanawanui pae nanometer.


Hoʻohālikelike piha i ka Workpiece Comprehensive o ka Robotic Polish Machine
Kākoʻo ka ʻōnaehana i ka hana ʻana o:
-
Nā ʻili pālahalahano ke aniani, nā keramika, a me nā papa metala
-
Nā ʻano cylindrical a me conicale like me nā wili, nā ʻau, a me nā paipu
-
Nā ʻāpana poepoe a me nā ʻāpana asphericalno nā ʻōnaehana optical
-
Nā ʻili kūʻokoʻa a me nā ʻili ma waho o ke axisme nā piʻo paʻakikī a me nā hoʻololi
ʻO kona versatility e kūpono ai noka hana nui a me ka hana maʻamau kikoʻī.
Nā Hiʻohiʻona Koʻikoʻi a me nā Pōmaikaʻi o ka Mīkini Polishing Robotic
1. ʻenehana poʻo poli pālua
-
Ua lako mehoʻohuli hoʻokahia mehoʻohuli ponoʻīnā poʻo wili no ka maʻalahi.
-
Kākoʻo ka hiki ke hoʻololi wikiwiki i nā mea hana i nā ʻano hana he nui me ka ʻole o ka manawa hoʻomaha lōʻihi.
-
Kūpono no ka hoʻololi ʻana ma waena o nā pae wiliwili coarse a me nā pae wiliwili maikaʻi.
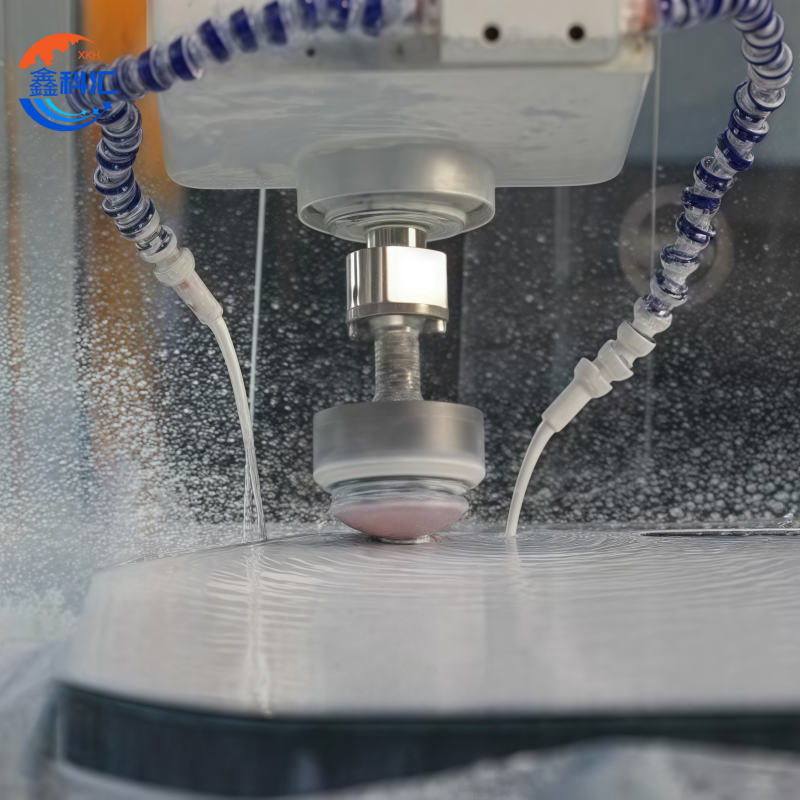
2. ʻŌnaehana Mana Hoʻomalu Kūpono
-
Ka nānā ʻana i ka manawa maoli okaomi, mahana, a me ke kahe ʻana o ka wai wili.
-
ʻO ka hoʻopili ʻana o ka ikaika mau e hōʻoia i ka hoʻopau like ʻana o ka ʻili ma ka workpiece.
-
Hiki ke hoʻololi aunoa i nā ʻano kūlike ʻole o ka ʻili.
3. Mana Lopako ʻEono-Axis
-
Ke kūʻokoʻa piha o ka neʻe ʻana e lawelawe i nā geometries paʻakikī.
-
Nā ala neʻe laumania a pololei i helu ʻia ma o nā algorithms holomua.
-
ʻO ke pololei o ke kūlana hana hou ʻana mai ±0.04 mm a i ±0.1 mm ma muli o ke kumu hoʻohālike.
4. Hana Hoʻokele Akamai a me ke Ana ʻana
-
Nā mea hana hoʻoponopono ponoʻī no ka hoʻonohonoho pololei a me ke kaulike ʻana.
-
ʻŌnaehana ana hoʻonohonoho no ke kau pololei ʻana.
-
Kohoka nānā ʻana i ka mānoanoa ma ka pūnaeweleno ka kaohi maikaʻi manawa maoli.
5. Kūlana Kūkulu Papa ʻOihana
-
Hoʻonui ka hoʻolālā servo-motor pālua i ka pono a me ke kūpaʻa polishing.
-
ʻO ke ʻano mechanical paʻa e hōʻemi i ka haʻalulu a hōʻoia i ka lōʻihi o ka lōʻihi.

Nā Kikoʻī ʻenehana o ka Mīkini Polishing Robotic
| Hoʻohālike Lako | Kino Lopako | Hoʻoponopono hou i ka pololei o ke kūlana | Ka laulā anawaena hana | Poʻo Polishing Rotary Hoʻokahi | Poʻo Polishing Multi-Rotation | Mea Hana Liʻiliʻi | ʻAno Hoʻopili ʻAno Huila Nui | Ka hoʻowali ʻana i ke poʻo poepoe | Hoʻopau i ka Hoʻololi wikiwiki | Mea Hana Hoʻoponopono Aunoa | Poʻo Ana Hoʻonohonoho | Ka Nānā ʻana i ka Mānoanoa Pūnaewele | Kahua Mana Helu |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | ʻO Staubli TX2-90L | ±0.04mm / laulā piha | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | ʻO Staubli TX2-140 | ±0.05mm / laulā piha | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | ʻO Staubli TX2-160 | ±0.05mm / laulā piha | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | ʻO Staubli TX200/L | ±0.06mm / laulā piha | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ʻO ABB IRB6700-200/2.6 | ±0.1mm / laulā piha | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ʻO ABB IRB6700-150/3.2 | ±0.1mm / laulā piha | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ʻO ABB IRB6700-150/3.2 | ±0.1mm / laulā piha | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Nā nīnau i nīnau pinepine ʻia - Mīkini Polishing Robot
1. He aha nā ʻano hana e hiki i ka mīkini wili lopako ke lawelawe?
Kākoʻo kā mākou mīkini wili lopako i nā ʻano a me nā ʻili like ʻole, me nā ʻano pālahalaha, kūlou, poepoe, freeform, a me nā contours paʻakikī. He kūpono ia no nā ʻāpana optical, nā hoʻoheheʻe kikoʻī, nā ʻili metala, a me nā noi wili kikoʻī ʻē aʻe.
2. He aha ka ʻokoʻa ma waena o nā poʻo wili Single Rotation a me Multi-Rotation?
-
Poʻo Polishing Rotary HoʻokahiHoʻohuli ka mea hana a puni hoʻokahi axis, kūpono no ka hoʻopau ʻana i ka ʻili maʻamau a me ka wehe ʻana i nā mea me ka wikiwiki.
-
Poʻo Polishing Multi-RotationHoʻohui ka mea hana i ka wili ʻana me ka wili ponoʻī (orbiting), e hiki ai ke hoʻopili like ʻia ma nā ʻili piʻo a ʻano ʻē.
3. He aha ke anawaena hana kiʻekiʻe loa?
Ma muli o ke kumu hoʻohālike:
-
ʻO nā hiʻohiʻona liʻiliʻi (e laʻa, IRP500S) ka limaΦ50–Φ500mm.
-
Hoʻokele nā mamana nui (e laʻa me IRP2000AD) a hiki iΦ2000mm.
E pili ana iā mākou
He loea ʻo XKH i ka hoʻomohala ʻenehana kiʻekiʻe, ka hana ʻana, a me ke kūʻai aku ʻana i ke aniani optical kūikawā a me nā mea kristal hou. Lawelawe kā mākou huahana i nā mea uila optical, nā mea uila mea kūʻai aku, a me ka pūʻali koa. Hāʻawi mākou i nā ʻāpana optical Sapphire, nā uhi lens kelepona paʻalima, Ceramics, LT, Silicon Carbide SIC, Quartz, a me nā wafers kristal semiconductor. Me ka ʻike loea a me nā lako hana kiʻekiʻe, ʻoi aku mākou i ka hana ʻana i nā huahana maʻamau ʻole, me ka manaʻo e lilo i alakaʻi i nā mea optoelectronic ʻoihana ʻenehana kiʻekiʻe.

Nā Huahana Pili
-

4H-semi HPSI 2 inihi SiC substrate wafer Producti...
-
Maʻamau pahu huinaha halihali pahu huinaha window p ...
-

6'īniha HPSI SiC substrate wafer Silicon Carbide ...
-

ʻO Sapphire Corundum no ka Gemstone Al2O3 crystal ru ...
-

ʻO ka metala alumini hoʻokahi aniani substrate polishe ...
-

ʻO ka wafer i uhi ʻia me Au, ka wafer sapphire, ka wafer silicon ...